RoboCar
J’ai choisi de travailler sur ce projet car il représentait un vrai défi technique mêlant intelligence artificielle, robotique et programmation bas niveau. Ce projet me permettait de mettre en pratique mes compétences en IA et en développement, tout en explorant un domaine concret et stimulant : l’autonomie des véhicules.
Pour ce projet, nous étions un groupe de 5 étudiants, sélectionnés pour nos capacités complémentaires, ce qui nous a permis de collaborer efficacement et de relever ensemble les défis rencontrés.
Le projet RoboCar consiste en la conception et le développement d’une voiture télécommandée fournie par Epitech. Nous avons commencé par démonter la voiture afin d’y installer les modules nécessaires, notamment une Jetson Nano, qui sert de cerveau au véhicule.
Nous avons eu 5 mois pour développer les intelligences artificielles de la voiture, tout en gérant en parallèle d’autres projets académiques. Ce temps limité nous a obligés à optimiser notre organisation et nos choix techniques.
Le fonctionnement de la voiture repose sur deux intelligences artificielles :
- IA de perception : analyse des segments de piste et évaluation des distances par rapport aux obstacles environnants, générant un ray-cast qui représente la vision de la voiture.
- IA de navigation : prend en entrée les ray-casts et décide des mouvements optimaux pour effectuer des tours de circuit efficacement.
Les IA ont été réalisées en Python pour la facilité, mais la communication entre elles a été faite en C++ pour l’efficacité. L’ensemble du système fonctionne grâce à la Jetson Nano et une caméra fixée à l’avant de la voiture, permettant au véhicule d’analyser son environnement et de se déplacer de manière autonome sur le circuit.

RoboCar en test sur piste simulée
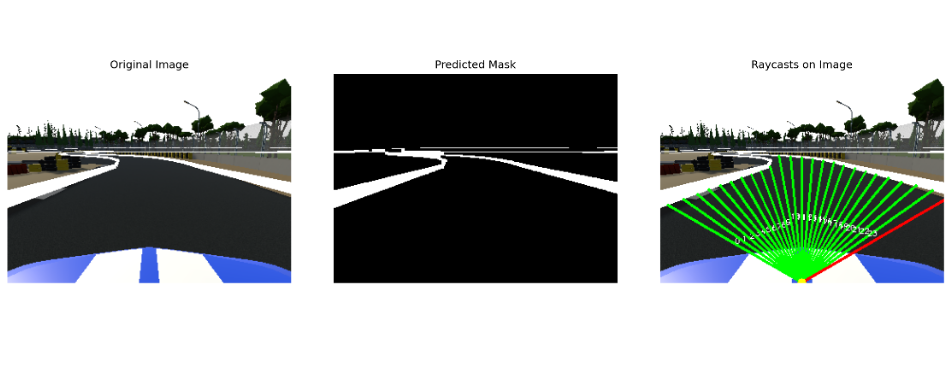
Démonstration de l’IA réalisant les ray-casts sur les segments de circuit
Compétition inter-Epitech
À la fin du projet, nous avons participé à une compétition regroupant toutes les Epitech. Chaque équipe présentait sa RoboCar afin d’élire la voiture la plus rapide et la plus performante sur circuit. Cet événement a été l’occasion de confronter nos solutions techniques à celles des autres équipes et de mettre à l’épreuve notre travail dans un cadre compétitif.